-

技术实力
-

品质保障
-

售后无忧
-

扶持定制
-

多年经验

联系人: 陈经理
手机:13315735036
邮箱:baichang56@163.com
网址:www.qsbcwl.cn
厂址:昆山经开区
江苏百昌智能物流科技有限公司在给用户做方案时会依据用户不同的情况定制属于他们自己的上下料方式。下面由江苏百昌智能物流科技的小编同学依据多年的实战经验总结出以下常用的AGV机器人上下料方式。
方式一:人工上下料
当前人工上下料是我国性价比较高的一种,而AGV机器人主要是替换掉传统叉车和人工的工作,上下料的工作主要还是由人工来完成的。人工需把物料放到AGV机器人上,然后由AGV机器人自动将物料送到用户的目得地,再由人工将物料箱取下,换上空物料箱。
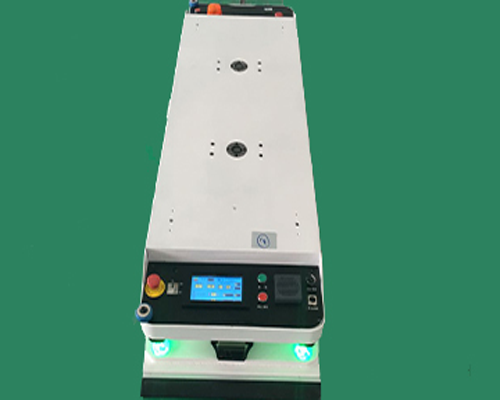
方式二:自动升降挂销

自动可实现小车自动上下料,挂脱料式AGV机器人选用的自动料车底部穿越方式,在料车的底部有一个捕捉升和降的机构,当小车行驶至指定的地点时,升降销便会升起,挂上料架车。然后小车牵引料架车再行驶到下一个用户指定的地点,升降销便会下降, 放下物料然后架车离开。
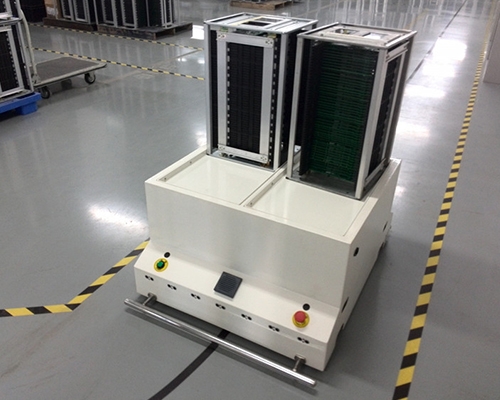
方式三:AGV机器人自带顶升装置
AGV机器人顶升装置可升降货物框然后将其搬运到用户指定的地点,然后自动卸下货物并离开。江苏百昌智能物流科技的小车选用麦克纳姆轮技术,可实现小车任意角度、方向移动:原地360°旋转、横行、斜行、前进后退等等。所以能够在狭窄的巷道空间内自由移动和搬运,可靠的连接设计更能确保机械的同步升降,使货物升降更加案全稳定。
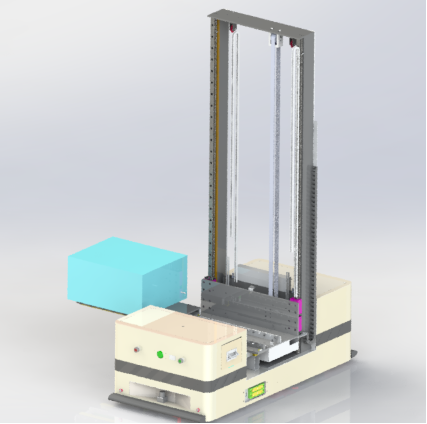
方式四:滚筒平台对接
AGV机器人可准确地与滚筒进行对接。AGV机器人当到达生产线的上下料站点后,便会与滚筒码头进行信息的交互,自动和码头进行对接,然后执行相应的上下料任务。AGV机器人上的对接平台和上下料的滚筒码头之间是通过复一种杂的光电传感装置来进行水平方向以及竖直方向的对接的。
方式五:AGV+机械臂的结合
AGV机器人加上机械臂的结合这一应用主要用于机加工或电子的无人车间,通过AGV机器人来代替人员的移动、搬运动作,并通过机械手臂来代替人工的抓取动作,实现大范围的空间内的货物抓取以及移动小车的物流传递。
更多关于AGV机器人的信息您可以致电我们。




 地址:昆山经开区
地址:昆山经开区 热线:13315735036
热线:13315735036 邮箱:baichang56@163.com
邮箱:baichang56@163.com